

Article and Figures Provided By: Tim Battista (NOS/NCCOS)
Duration: 28 months (06/26/19 – 05/31/21)
Principal Investigator(s): Mike Aslaksen, Tim Battista, Wayne Wright,
Jenna Brown, and Christine Kranenburg
U.S. Department of Commerce
NOAA / National Centers for Coastal Ocean Science
Unmanned aircraft systems (UAS) with Flash Structure from Motion (SfM) capabilities are of great interest as a supplement to existing technologies for marine debris detection, reef restoration, and ship-grounding impacts. Coastal storms and geo-hazards, including hurricanes, nor’easters and tsunamis, can deposit marine debris over vast areas, threatening marine ecosystems and navigation safety. Identification and geolocation of the debris is necessary to direct removal efforts, but can be a challenging and expensive task. These events can also cause significant damage to coral reef communities and even dislodge corals. Restoration triage to “replant” the damaged corals is time critical. Additionally, ship-grounding incidents caused by coastal storms require accurate and rapid information to conduct damage assessment and recovery efforts. The available geospatial information collected after Hurricanes Maria and Irma, which heavily impacted the U.S. Caribbean and beyond, clearly indicate the limitations of current coastal intelligence abilities to addressing disaster impacts in the littoral zone.
Ships and boats equipped with multibeam echo sounders, side scan sonar, or interferometric sonar systems can provide extremely useful data for detection of marine debris and ecological damage assessment. However, lengthy transit times, and operating in shallow, debris-filled areas can be difficult and even dangerous for larger research vessels. Similarly, remote sensing from conventional aircraft and satellites are moderately useful at broad scales for assessment and recovery, but conventional aircraft can be expensive to deploy, and the resolution may be insufficient for detection of small-to-medium-sized objects, especially with satellite-based data.
Our previous work to operationalize sUAS (Small Unmanned Aerial Systems) and Structure from Motion (SfM) for bathymetric mapping was highly successful over clear coastal waters where there is high bottom texture and fixed non-moving bottom features, such as coral reef (Figure 1). However, areas dominated by featureless sand, mud, or seagrass or breaking waves (i.e. caustics) were less successful. The National Centers for Coastal Ocean Science propose to demonstrate a new capability, which uses multiple sUAS in formation flight to acquire simultaneous photos of the same location, known as Flash SfM, to overcome challenges of featureless seafloor surface waves or moving objects.

What We Are Doing
The goal of this project is to develop the Flash SfM method to enable accurate, noise free mapping of textureless and highly textured bottom topography, such as submerged sandy and muddy areas, or areas with moving submerged aquatic vegetation. The method proposed in this project will enhance the capability of SfM shallow water mapping with UAS. Enabling the Flash SfM capability is in direct response to geospatial information needed to support disaster response, damage assessment, and recovery phases of disaster response pertaining to NOAA mission requirements.
We will be using three sUAS, each of which will simultaneously collect photos from downward-looking cameras, to survey an area in formation flight (Figure 2).
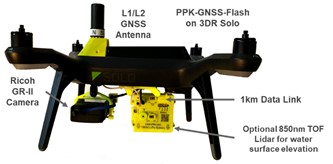
Each photo-trio and corresponding precision GPS position will be processed to yield a fully georeferenced point cloud of the surface. Each sUAS will use special Post Positioning Kinematic (PPK) GPS systems and camera controllers that were developed in support of our 2017 project. These PPK systems have been uniquely designed to allow synchronized camera operation without requiring any coordination between sUAS systems. As many synchronized PPK camera systems as desired can be flown at the same time without any inter-UAS communications links. During the automated mission portion of the flight, the three sUAS will follow a common flight plan with designated horizontal offsets from the lead aircraft. We anticipate having a flight leader sUAS, and a left and right trailing wingman sUAS. We will develop and refine the optimal protocol for takeoff, rallying, returning to home, and landing each of the formation aircraft. In addition, we will develop emergency procedures to address multiple potential emergency situations.
To our knowledge, there is currently no alternative operational system that implements the aforementioned approach.
Impact and Benefits of Our Work
UAS SfM shallow bathymetric mapping is significantly more cost effective for seafloor mapping in remote areas where it is difficult and expensive to deploy manned resources. It is also much lower risk and less invasive than existing boat or ship based methods in shallow water in and around coral reefs, shallow sandbars, and sensitive seagrass beds. We have demonstrated significant capability for mapping well textured coral reef environments using a single sUAS capturing sequential digital photos; however, the method does not work over bottom types such as sand, seagrass, mud, and any other non-descript low texture substrate.
Flash and caustics can enable mapping of areas where the sequential SfM methods fail, and where other traditional SONAR or bathy LIDAR are prohibitive. Through this project, we intend to demonstrate the capability of this approach and subsequently transition the capability to other line offices in NOAA, and other Federal, state, and territorial agencies. The proposed sUAS sensor system has the potential to provide a cost-effective, accurate, and rapid means to overcome the current limitations of disaster response approaches. This improved detection could potentially reduce human risk, and the resultant economic cost, in addition to providing information that could be rapidly used for disaster recovery and damage assessment efforts.
This capability, once demonstrated will be transitioned to NOAA programs that have a requirement for more resolved information provided by the Flash SfM including NOAA Office of Restoration and Response, NMFS Restoration Center, and other Federal, State, and Territorial agencies that have similar needs (i.e. National Park Service, Coastal Zone Management agencies). This research in part is made possible with funding from the NOAA UAS Program to accelerate transition of UAS research to operations.