
Article and Figures Provided By Lauren Marshall (Cherokee Nation Businesses / GLERL)
Principle Investigator: Andrea Vander Woude1
Co-Investigator: Steve Ruberg1, Co-Investigator: Lauren Marshall2
Co-Investigator: Eric Anderson1, Co-Investigator: Dennis Donahue1
Co-Investigator: John Sullivan3, Co-Investigator: Zachary Haslick3
1 Great Lakes Environmental Research Laboratory (GLERL)
2 Cherokee Nation Businesses / GLERL
3 Aerodata, Inc.
While the pandemic has presented challenges to field operations these past few months, NOAA Great Lakes Environmental Research Laboratory (NOAA GLERL) has worked to continue collecting data in a safe manner. Data provides critical monitoring of cyanobacteria harmful algal blooms (cyanoHABs) in the western basin of Lake Erie. Crewed aircraft flyover operations, while delayed, continued to provide robust data sets beneath clouds and nearshore. In order to operate comfortably, crewed flyover operations are performed 3500-6500 feet with possible interference from cloud cover that is often forming as low as 1800 feet above the western basin. Next summer, with the support of UASPO funding, GLERL will operate a multi-rotor Uncrewed Aircraft System (UAS) to fly beneath the clouds and provide unprecedented imagery of areas close to shore, addressing a key information gap. The combination of these data sets will support the NOAA Lake Erie HAB Forecast.
How these Pandemic Times have Affected Monitoring
The airborne HAB detection and mapping program at NOAA GLERL includes a hyperspectral camera, the Resonon Pika II, mounted in a contracted single engine Cessna aircraft (see July article for more details). This summer, the Pika L, with a higher spectral range and more bands, was to be mounted and deployed on a multirotor UAS to provide additional data during low cloud cover, but has been delayed until training can be completed safely with proper social distancing. Crewed aircraft flights continued with the Pika II. During a normal field season GLERL would complete an average of 25 flights, but will conclude with a total closer to 16 since the season was delayed until July. The imagery collected during flights is processed using the cyanobacteria index algorithm (Tomlinson et al. 2016). The results are then compiled into a report for Ohio EPA, Michigan Department of Natural Resources, and water treatment managers.
Addressing the Gaps Moving Forward
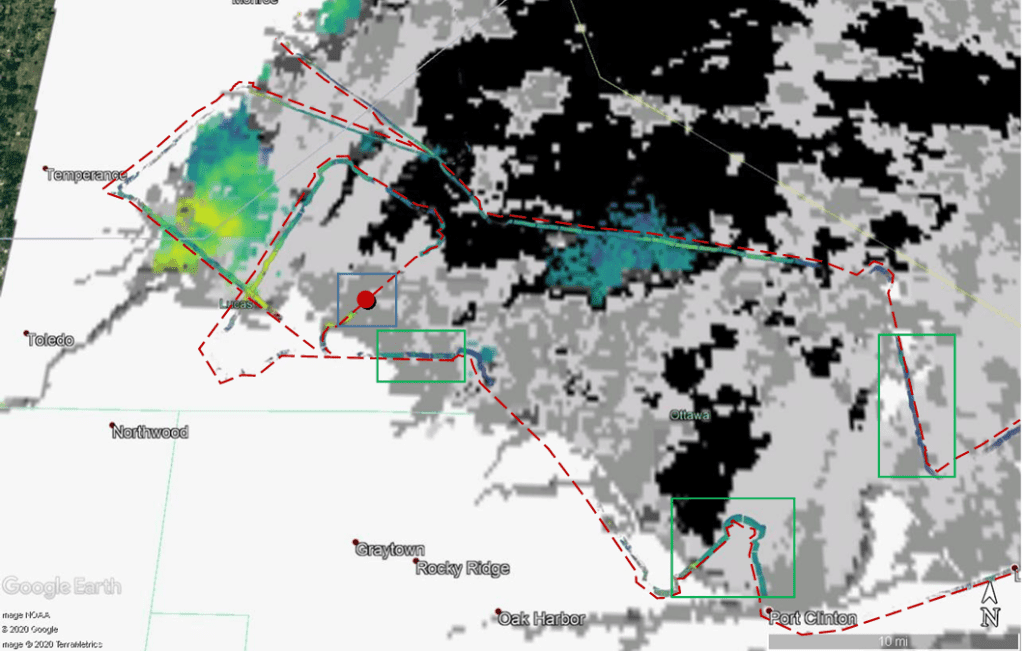
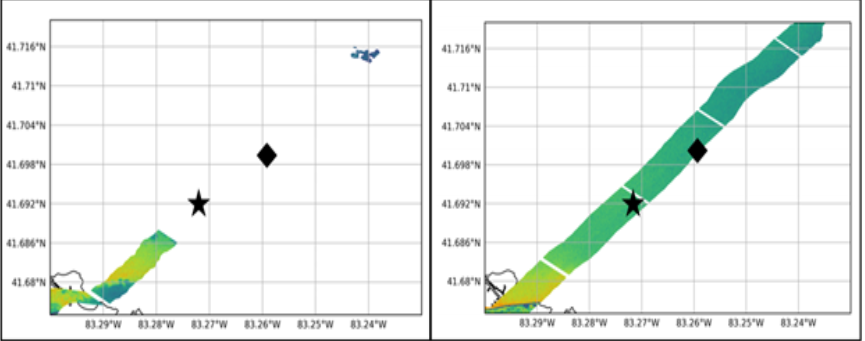
Low cloud cover and sun glint can both affect the resulting hyperspectral imagery from crewed aircraft flights. Figure 1 was collected on a particularly cloudy day. The red dashed line highlights the flight path, producing cyanobacteria data that was not visible with a satellite (highlighted with the green boxes). One of the lower clouds prevented the collection of any imagery surrounding two water treatment intakes (see Figure 2, left). In contrast, a hyperspectral image collected on a typical day will provide a swath that covers both intakes (Figure 2, right).
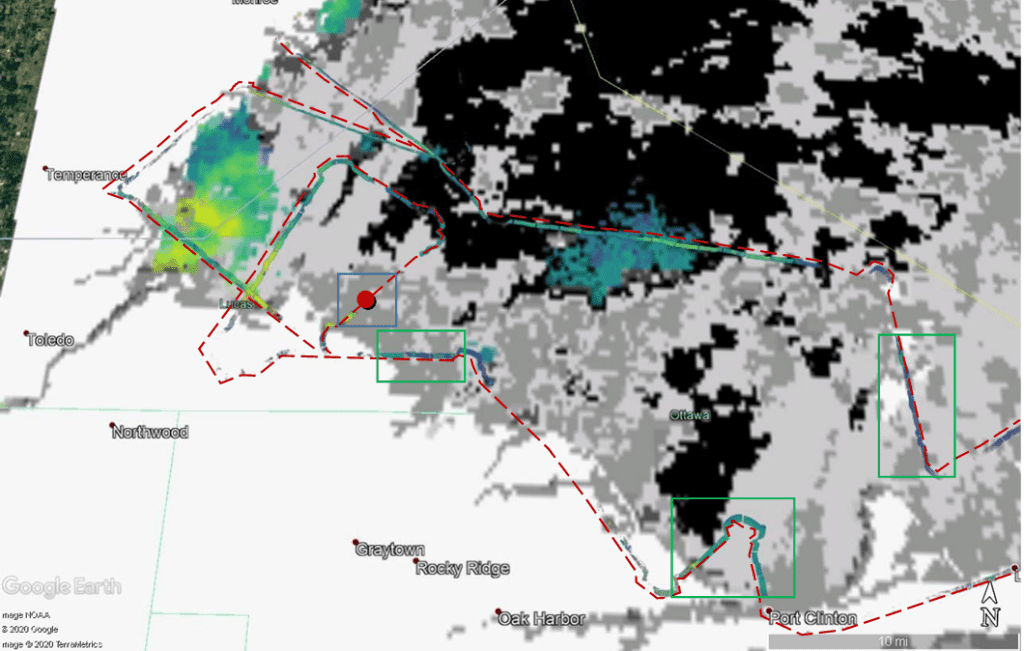
Low cloud cover and sun glint are both challenges that can be minimized with the use of a UAS. The low altitude simplifies the filtering process for sun glint. Reduced altitude also means that clouds as low as 1800 feet will not prevent data collection, as they would with a crewed aircraft. The image above is a perfect example of a critical data gap that can be addressed with the integration of a UAS platform. Therefore, next summer GLERL will be working to integrate the Pika L onto a multi-rotor UAS platform to perform monitoring. The accessibility of the UAS platform offers a rapid response capacity, allowing multiple flights to be performed within a week, if conditions were to change, unlike the weekly crewed aircraft flight schedule. This work is currently funded under the Great Lakes Restoration Initiative (GLRI), Synthesis Observation and Response (SOAR) project, with flights over Lake Erie and Saginaw Bay on Lake Huron.
Impact of Our Work
Developing UAS capabilities to compliment current crewed aircraft flights and in situ sampling, will allow NOAA GLERL to provide consistent monitoring of the rapidly changing Great Lakes cyanoHABs, an effort that addresses critical health implications and economic impacts to coastal communities. As the 2020 field season comes to an end, GLERL is already working to expand and improve multiple aspects of cyanoHABs monitoring from processing algorithms to training on the multi-rotor UAS platforms.